- Auftraggeber
- BMW Garching
- Inhalt
- Straßen-, Gebäude- und Landschaftsscanning
- Verwandte Referenzen
- 3D-Scan Fußballstadion
- Schlagwörter
- Verwandte Themen
- 3D-Vermessung
- 3D-Laserscanning
Im Jahre 2017-2018 konnten wir für die Forschungsabteilung von BMW für autonomes Fahren und Fahrer-Assistenzsysteme ein umfangreiches, technisch anspruchsvolles und innovatives 3D-Scanning-Projekt in der Kombination und Fusion von luftgestütztem und terrestrischem 3D-Scanning realisieren.
Dank unserer langjährigen und intensiven Zusammenarbeit mit der Firma RIEGL konnten in dem Projekt terrestrische Mid- und LongRange-Laserscanner (VZ-400 und VZ-2000i) sehr erfolgreich eingesetzt werden.


In diesem Projekt wurde mit sehr hohen Genauigkeiten eine Gesamtfläche von mehr als 240 Hektar dreidimensional und fotorealistisch vermessen und modelliert.
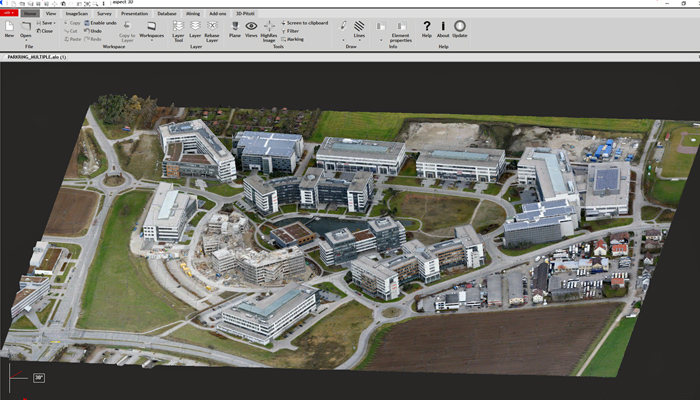
Rechts: BMW – Ausschnitt Lidar Daten

Die Ergebnisse unserer Arbeit wurden in einer vom BMW geförderten Dissertation von Alexander Schaermann (1) für die weitere Analyse genutzt und ausgewertet. Speziell für den Test und die Absicherung von Fahrerassistenzsystemen mit umfelderfassender Sensorik nutzte Schaermann Methoden der Simulation und Validierung.
Als grundlegende Ist-Zustandsdokumentation haben wir dreidimensionale virtuelle Repräsentationen der realen Umgebung erarbeitet, in der sich virtuelle Objekte während der Simulation bewegen können. Da Schaermanns Validierung auf dem Vergleich realer und simulierter Daten beruht, bestand unsere Aufgabe in der genauen virtuellen Nachbildung eines realen Streckenabschnitts. Auf diese Weise wurde maximale Vergleichbarkeit zwischen der realen und virtuellen Welt erreicht. An die Umgebungs-Modellierung stellte BMW besonders hohe Anforderungen in Bezug auf die Genauigkeit der Modell-Geometrie und Georeferenzierung. Zusätzlich sollte das zu erstellende Umgebungsmodell fotorealistisch sein, um Modelle bildgebender Sensoren (insbes. der in die Fahrzeuge integrierten Kameras) prüfen zu können.
Um diverse Fahrszenarien auf unterschiedlichen Straßentypen untersuchen zu können, wurde ein Areal im Westen von Garching festgelegt, bei dem Stadtbereiche, Landstraße und Autobahn nahe beieinander liegen. Für uns waren drei präzise aufeinander abzustimmende Dokumentationsschritte notwendig, um die Aufgabenstellung zu erfüllen: 1. Vermessung des gesamten Areals mit unterschiedlichen, kombinierten 3D-Sensoren 2. Fusion der aufgezeichneten Messdaten (dGPS und IMU, Laserscan & Photogrammetrie) und 3. Modellierung und Konvertierung der registrierten Daten in ein passendes Format.
"An die Umgebungs-Modellierung stellte BMW besonders hohe Anforderungen in Bezug auf die Genauigkeit der Modell-Geometrie und Georeferenzierung."
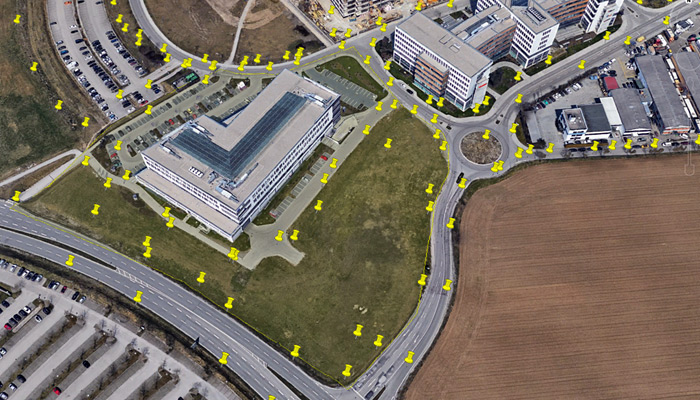
Im Endergebnis können nun in dieser hochgenauen Simulationsumgebung beliebige virtuelle Fahrten durchgeführt werden. Da das zu erstellende Umgebungsmodell georeferenziert sein muss, benötigten die jeweiligen Messgeräte (Laserscanner und Kameras) entsprechende GNSS–Sensoren. Im Rahmen der terrestrischen Photogrammetrie wurden Fotoaufnahmen vom Boden beziehungsweise auch von einer mobilen Bühne und in kleinen Bereichen mit einer Photogrammetrie-Drohne erfasst. Hauptsächlich wurde damit der Stadtbereich im Nahbereich vermessen. Bei der luftgestützten Photogrammetrie wurde ein Hubschrauber eingesetzt, um die restlichen Bereiche, vor allem Felder, die Autobahn und Landstraßen zu vermessen. Während der Datenfusion wurden die dGNSS–Daten der Referenzstationen, die Punktewolken von Laserscannern und die Photogrammetrie–Aufnahmen gemeinsam ausgewertet, um die Geoposition und Modellgüte zu verbessern. Die Prüfung der erreichten Genauigkeiten erfolgte u.a. durch Vermessung eines umfangreichen Netzes von Referenzpunkten (Genauigkeitsanforderung: absolut: <5cm; relativ: <2cm).

Schließlich wurde die vermessene Umgebung 3D modelliert bis das gewünschte Level of Detail (LoD 300) nach Building-Information-Modeling (BIM)-Definition erreicht war und danach mit fotorealistischen Texturen bzw. abgestimmten PBR-Materialien texturiert. Abschließend wurde die Polygon-Anzahl für die Echtzeitfähigkeit der Simulation optimiert und das fertige Modell zur Qualitätssicherung mit der Punktewolke aus dem Fusionsschritt verglichen.

Für die bei BMW in dem Forschungsprojekt genutzte virtuelle Umgebung konnte das fertiggestellte Modell in für die Simulationsumgebung geeignete Formate (OpenFlight (FLT) oder OpenSceneGraph (IVE)) exportiert werden. Bei BMW wurden danach zahlreiche Forschungs-Aufgaben rund um die Analyse und Visualisierung realer Fahrzeug-Sensorik in virtuellen Umgebung entwickelt.